欢迎光临 Eyevision软件中国技术服务中心_3D精密测量_3D视觉_3D涂胶检测_焊缝引导_针脚高度检测_EVT软件_360度轮廓检测系统_3D焊接质量检测系统_机器人视觉
语言选择:
 ∷
∷

∷
 ∷
∷

无示教3D视觉引导机器人鞋底喷胶
项目要求:
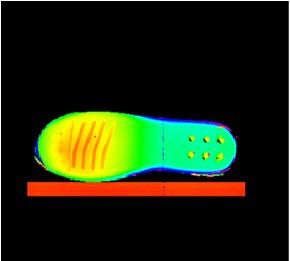
鞋底由传送带运输,经过3D轮廓扫描仪,行成点云图,经过Eyevision 3D Pfrofile 点云轮廓分析软件,快速分析出鞋底的最高点轨迹,平面和斜面交叉点的轨迹,经过数学分析,输出坐标和平面法相量,使机器人喷嘴,始终和作业面垂直。 并引导机器人无示教快速喷胶。
项目难点:
鞋型是曲线,边沿高低不同,宽度不同,轮廓点不容易捕捉,前后和脚心位置有粘贴多出的橡胶,轮廓图有干扰。
项目方案:
采用EVT激光轮廓传感器结合EVT Eyevision 3D轮廓软件 。 该传感器可以实时获取工件表面轮廓,并可以返回出机器人需要的三维坐标信息,实时引导机器人的涂胶轨迹。

联系人:销售苗经理
手机:18964566936
电话:021-50116667
邮箱:info@bijoy-tec.cn
地址: 上海市嘉定区阿克苏路1187号大卫国际大厦810室